MIT Develops Advanced Spatial Memory System for Robots
MIT researchers have developed a new long-term memory framework that enables robots to rapidly form and recall detailed mental models of their environment. This spatial memory system allows robots to efficiently capture information about objects as they explore, facilitating complex query responses in plain language. The advancement aims to improve human-robot collaboration by allowing robots to reason about time and space similarly to humans.
Researchers at MIT have created a novel long-term memory framework for robots, designed to enhance their ability to navigate and interact with complex environments. This system allows robots to efficiently develop and access a "spatiotemporal" memory, similar to how humans remember where they left items.
The framework enables robots to quickly form and recall detailed mental models of large-scale environments. It combines advanced map representations with rich descriptions of the surroundings gathered over time, allowing robots to answer complex queries about their environment in plain language. This system operates in real-time and demonstrates higher accuracy than current state-of-the-art methods.
Luca Carlone, an associate professor at MIT’s Department of Aeronautics and Astronautics, stated that the goal is for robots to "speak the same language" as humans, reasoning about time and space similarly. This method transforms traditional maps into language-based maps, making them more accessible for robot cognition and linguistic interaction.
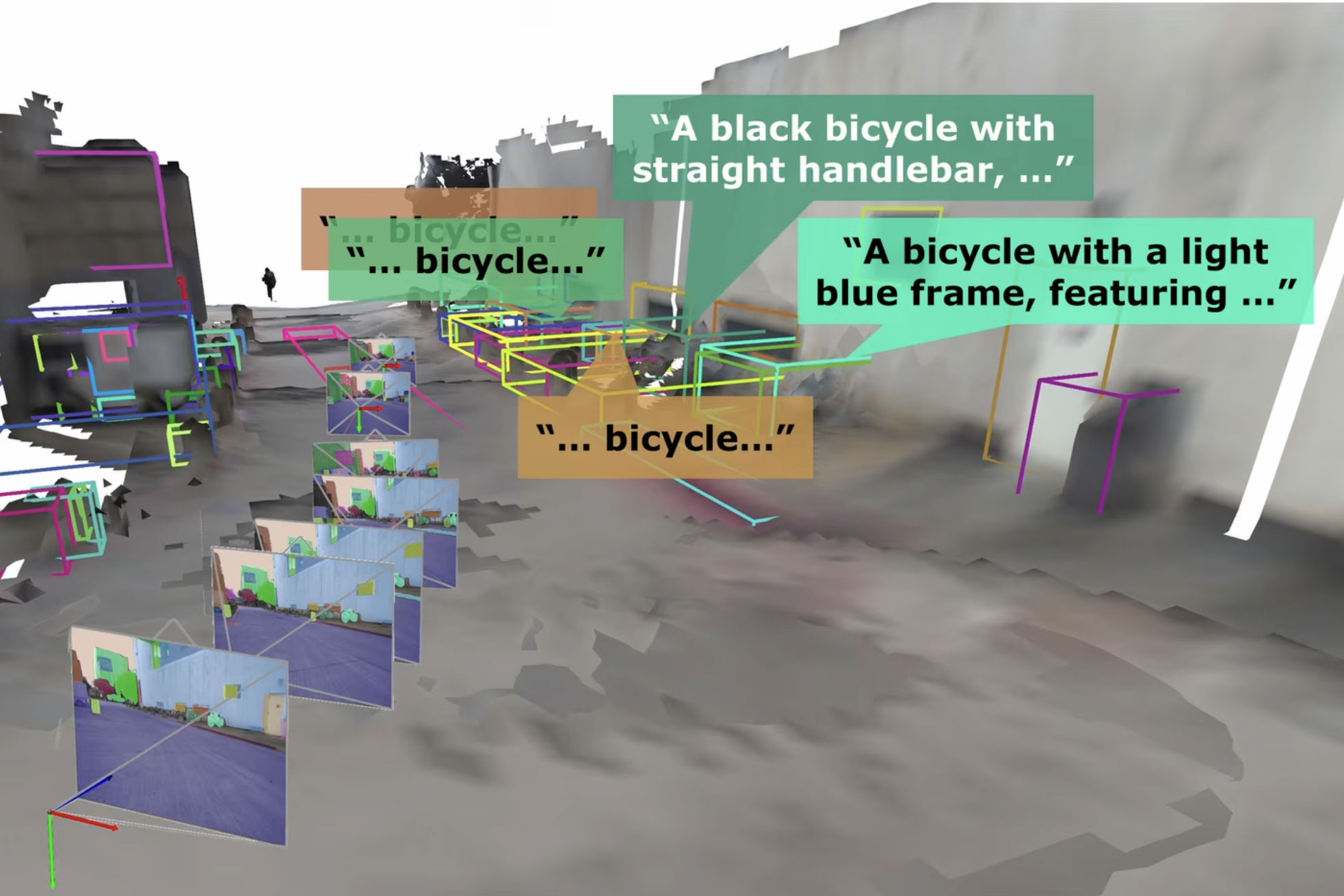
The new method, named "Describe Anything, Anywhere, Anytime, at Any Moment" (DAAAM), bridges computer vision and robotic mapping techniques. As a robot traverses an environment, DAAAM attaches detailed descriptions to observed objects, such as identifying a building or noting the characteristics of bicycles on a rack. This information is stored in a spatially arranged 3D map representation.
Potential applications extend beyond robotics to augmented reality systems, where it could assist maintenance workers in anomaly detection or aid commuters with wayfinding. The research was presented at the Conference on Computer Vision and Pattern Recognition (CVPR) by lead author Nicolas Gorlo, an MIT graduate student; Lukas Schmid, a former MIT research scientist; and Professor Carlone.
According to MIT News AI, this technology could eventually allow a human worker to simply ask a robotic assistant to retrieve a specific item, such as a partly assembled component, from a known location.